Robotik 
Feststellung ( 02.03.2010 ) ( Christof Ermer..)
Etwas, dass sein Tun, seine
Wege die es geht, selbst bestimmt,
etwas sich bewusst ist und Erinnerungen besitzt,
ist nicht etwas, sondern jemand !

https://www.outerplaces.com/science/item/5583-12-robot-fails-to-make-you-realize-the-future-isnt-here-yet
Bild eines russischen Roboters zur Erforschung der Mondtauglichkeit_
Vorgänger von Lunochod. Auf das Bild Klicken = MP4 Video
Astroman
Bilder von seinen restaurierten Spielzeugrobotern "Astroman"
geschickt. Unter Sammlern durchaus mal 800 Euro wert. Das ist richtige
60er Jahre Science fiction. Die Roboter sind mit der Drahtfernsteuerung
sehr beweglich. Sie können mit den Armen Kisten aufheben und stapeln.
Sehr freundlich blicken sie aber nicht drein. Könnten auch Kampfroboter
aus Perry Rhodan sein.

LINKS:
http://www.spiegel.de/thema/kuenstliche_intelligenz/
http://www.spiegel.de/netzwelt/web/facebook-laesst-kuenstliche-intelligenz-erforschen-a-938212.html
Roboter Arm...
http://www.igus.de/wpck/10088/robolink_Antriebseinheit_6_Achsen

ICRA:
Können Roboter eine Persönlichkeit entwickeln?
KI- Methoden:
http://de.wikipedia.org/wiki/Hopfield-Netz
Von der FH Regensburg:
http://fbim.fh-regensburg.de/~saj39122/Diplomarbeiten/IngoFrank/da/da.pdf
KI http://fbim.fh-regensburg.de/~saj39122/Diplomarbeiten/rennbahn/html/da/da.pdf
nettes FH im Film: http://www.youtube.com/watch?v=huNIquNgVz4
Spiegel Artikel: Skeletkonstruktion
http://www.spiegel.de/wissenschaft/technik/0,1518,689406,00.html
dazu Video http://www.youtube.com/watch?v=cI9H4FoA0b4&feature=player_embedded
High Speed Robot Hand http://www.youtube.com/watch?v=-KxjVlaLBmk&feature=related
file:///G:/WWW/Roboter/Roboter%20defintion.pdf
file:///G:/WWW/Roboter/Laufmaschinen.pdf
Erfolgreiche KI Implemenation
Lernfgähige Maschine:
http://www-03.ibm.com/innovation/us/watson/what-is-watson/countdown-to-jeopardy.html
http://en.wikipedia.org/wiki/Watson_%28artificial_intelligence_software%29
http://www.spiegel.de/netzwelt/gadgets/0,1518,745831,00.html
http://winfuture.de/news,61506.htm
Seltsame Diskussionen im Netz
http://www.simulationsraum.de/blog/category/roboter/
http://www.simulationsraum.de/
http://www.simulationsraum.de/blog/2010/10/27/perry-rhodan-sos/
Je mehr ich über Roboter nachdenke, um so mehr wird mir klar,
daß das Roboterbild aus der SciFi Vorstellung, z.B. der Android Data
aus Star Trek, gänzlich andere Realitäten hat als
eine Maschine ( Industrieroboter ).
Dessen Verhalten wird allein durch
den Ablauf der Programmierung, also durch Funktionen
und Prozeduren organisiert.
Diese reagieren auf Sensordaten und erzeugen Bewegung in vorbestimmten
Raumkoordinaten.
Also nichts weiter als ein Dosenöffner. Ein Besen.!
Dennoch hat die Körperhaftigkeit die Fähigkeit reales zu verändern,
also etwas zu tun.
Nun ja, es fehlt der freie Wille.
Der freie Wille, der der Selbstbestimmung verwand ist, kann auch
bedeuten daß das eigene Produkt, dummes macht.
Dennoch "selbstbestimmt".
Und damit räume ich mit dem Vorurrteil auf, das "Künstliche
Intelligenz" = KI etwas mit Klugheit zu tun hat.
Humor und (ernste) Musik hat z.B. völlig andere Intelligenzkonzepte.
Diese schon eher..
Eine Maschine, die sich über mich lustig macht, würde ich intelligenz
unterstellen
Was ich sagen will, es braucht eine gänzlich anderen Ansatz.
Ebenfalls der Programmierung. Jedoch in gänzlich anderen Denkmustern.
Das Stichwort heisst "Selbstorganistion."
Ich denke da an
"Fische im Schwarm"
Kleine "Software" Strukturen, mir der Fähigkeit der Evolution.
(Datensätzenin FormvonStrukturen,die grundlegende Eigenschaften
repesentieren., Vitalität, Neigungen, Vorlieben.)
Der Vermehrung, einzelner Objekte,
der Vererbungg, und Eigenschaften,--GENE.. "struct" ,
Ein Unscharfes Erinnerungsvermögen ist notwendig,
Die Fähigkeit zu lernen und die Fähigkeit zu vergessen.. z.B. mit Hopfield
Netzwerken.
Eigentlich eine einfach Matrizen Operation.
Einfache Regeln reichen aus , um der Maschine undeterministsches
Verhalten zu ermöglichen.
Widersprechende Regeln zum Beispiel.
"Nähe suchen, aber Abstand halten" ( fast ein
weibliches Basiskonzept ?)
Vorteil. Ich Programmiere nur Verhalten, von mir aus kleine
"angeborne" Verhaltensmuster. Und bekomme komplexes Verhalten.
Doch wie?...
Dazu später mehr. Bin noch am basteln...
LERN HAUSAUFGABE:
http://de.wikipedia.org/wiki/Hopfield-Netz
http://www.neuronalesnetz.de/einleitung.html
http://www.neuronalesnetz.de/matrix.html
http://de.wikipedia.org/wiki/Matrix_(Mathematik)
Sensorik..
da kann man nun Sensoren bauen, wei es di eNatur nihct vorsieht.
z.B. ein Rundum Infrarot Radar ( Auge)
Rundsicht-Radar mit Infrarot Fertig, jedoch noch nicht
montiert
../IR_Radar/IR-Radar.html
Eine gewaltige
Ingenieursleistung einen Roboter zu bauen, aber leider ohne kognitive
Fähigkeiten
Eddi: http://www.zdf.de/ZDFmediathek/beitrag/video/727638/Wohngemeinschaft+der+Roboter+
Ich denke , das ist ein Holzweg,.
Kinder lernen auch nicht aus dem Physikbuch,
Die Alternative: Einfache Regeln reichen aus, eine Selbstorganisation
in Anrpruch zu nehmen..
Un dhier setzen die Experimente ein.
Doch ganz schön Aufwendig..
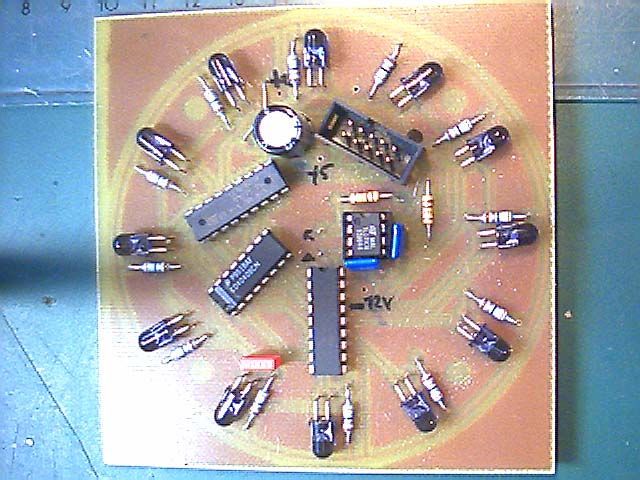
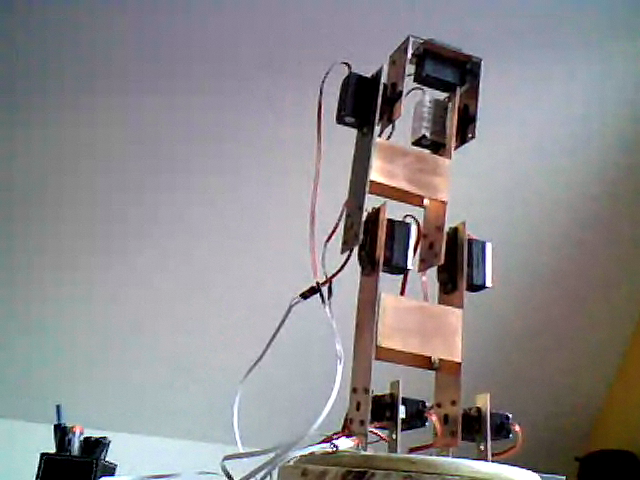
 Constantin Ude hat einen Roboterarm gebaut ( mit der
Multi PWM Steuerung )
Constantin Ude hat einen Roboterarm gebaut ( mit der
Multi PWM Steuerung )
8 Servos ! Einige davon sehr Leistungsstark Davon einige
gepaart.. 5 separate Servokanäle. Ein Schrittmotor
Drehteller. ( Kuchenplatte ) Seine
Idee.! "Nicht schlecht !"
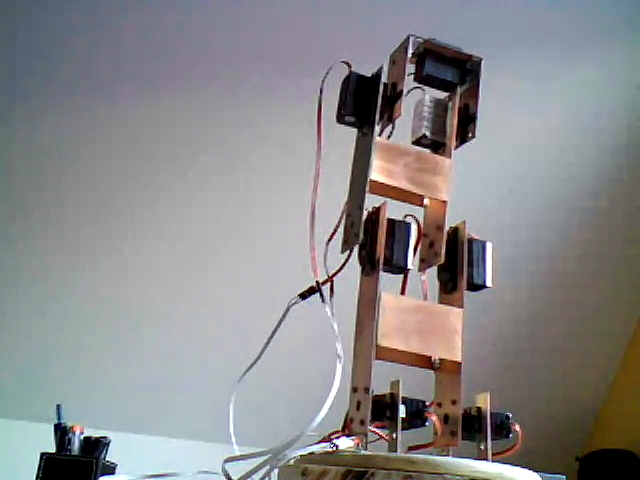

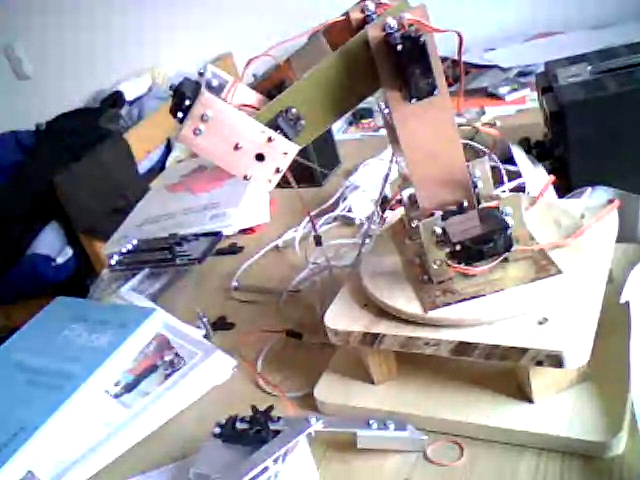

Ein besserer Versuch, selbstlernende Konzepte einzubinden,..
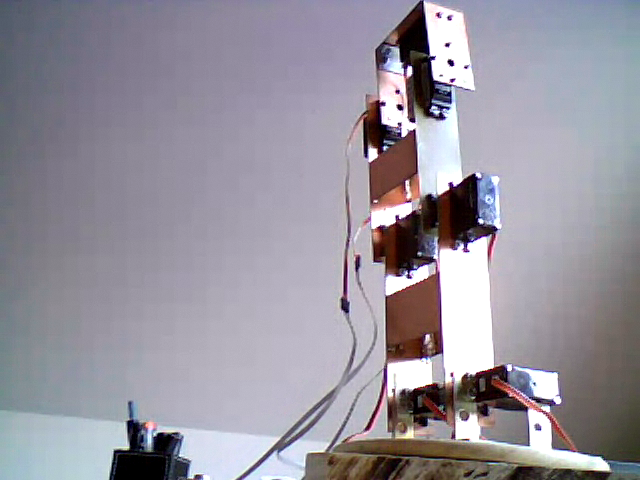
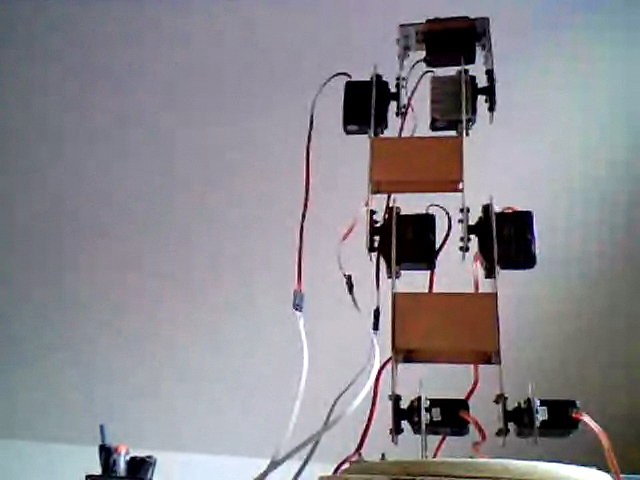
Diese Bauform habe ich selbt mit
Servos nachvollzogen. wenn auch nicht ganz so aufwendig.
Als Lernspeicher wurde der
Begrenzte Raum im Kuchensegmente
eingeteillt.
Wurde durch lernen mehr Speicher verbraucht, ging das auf Kosten
anderen "Wissens"
Das
Video hier ist jedoch gelungener..
Witzig das PDA als Steuercomputer-
http://www.zeit.de/2010/04/Robotik
Curiosity:
Es gibt keinen Joystick für den Mars-Rover
http://www.heise.de/newsticker/meldung/Curiosity-Es-gibt-keinen-Joystick-fuer-den-Mars-Rover-1748020.html
http://mars.jpl.nasa.gov/blogs/index.cfm?FuseAction=ShowBlogs&BlogsID=269
Die
Kraft der zwei
Zellen
Roboterforscher aus Goettingen haben ein erstaunlich einfaches
Verfahren gefunden, um die Schritte autonomer Laufmaschinen zu steuern.

Der sechsbeinige Roboter ist den amerikanischen Kakerlaken
nachempfunden, und er lernt sich, anhand eines Chaosprozesses, wie eine
zu verhalten
Wie viele Gehirnzellen braucht man, um die Fortbewegung eines
sechsbeinigen Roboters zu kontrollieren? Die überraschende Antwort:
zwei. Das jedenfalls kann man aus einem aktuellen Aufsatz in der
Zeitschrift Nature Physics schließen.
Der Roboter, um den es geht, heißt Amos. Er sieht aus wie eine
Spinne und kommt aus Göttingen. Beobachtet man Amos dabei, wie er über
einen Testparcours krabbelt, wie er seine Lauftechnik verändert, wenn
es bergauf geht, wie er Hindernisse umläuft und wild mit den Beinen
strampelt, sobald eines seiner sechs Gliedmaßen in ein Loch gerät –
dann fällt es schwer, das mit den zwei Zellen zu glauben. Gebaut haben
den Roboter vier Wissenschaftler vom Göttinger Bernstein Zentrum
Computational Neuroscience. Sie wollten wissen, warum
Insekten mit ihren kleinen Gehirnen sich so viel eleganter durch die
Welt bewegen als die technischen Geschöpfe der Ingenieure.
Ein klassischer Robotertechniker ist nur einer der vier, der
gebürtige Thailänder Poramate Manoonpong baute die Hardware der
Krabbelmaschine. Aus der Neurowissenschaft kommt Florentin Wörgötter.
Marc Timme und Silke Steingrube sind Physiker, die sich mit
Netzwerktheorie beschäftigen. Die damals 23-jährige Studentin
Steingrube war es, die bei ihrer Diplomarbeit auf die Idee kam, Amos
mit einer sogenannten Chaos-Steuerung einzusetzen.
Jedes laufende Lebewesen hat mehrere »Gangarten«. Bei uns Zweibeinern
sind die Varianten begrenzt, aber schon beim Pferd wächst die Zahl der
Möglichkeiten, erst recht bei Sechsbeinern wie etwa der Heuschrecke.
Aber selbst Tausendfüßler müssen nicht bewusst steuern, welches Bein
sie vor das andere setzen – die koordinierten Bewegungen folgen
bestimmten Mustern, die im Gehirn von sogenannten zentralen
Mustererzeugern (CPGs, von Central Pattern Generator) gesteuert werden.
Will man die künstlich nachempfinden, kommen klassischerweise
kleine Computerprogramme heraus, die zum Beispiel einen sechsbeinigen
Roboter anweisen: Hebe das vordere und hintere Bein der einen Seite
immer zusammen mit dem mittleren Bein der anderen Seite an! Das ist
eine sehr effektive Gangart, bei der immer drei Beine Bodenkontakt
haben. Weil Amos fünf Gangarten beherrscht, müsste er eigentlich über
fünf Programme verfügen, die je nach Umweltbedingungen abgerufen
werden. Tatsächlich aber – das ist die Innovation – werden alle fünf
Muster von den besagten zwei Neuronen produziert.
Neurone, lebende wie digital simulierte, sind kleine Zellen,
die untereinander mit Leitungen verbunden sind, den Synapsen. Ein
Neuron erzeugt aus eingehenden Signalen nach gewissen Regeln ein
Ausgangssignal. Mindestens zwei Neurone und drei Synapsen braucht man,
um sogenanntes Chaos zu produzieren: Trotz der simplen Verdrahtung
flackern die Zustände der beiden Zellen dann auf unvorhersagbare Art
und Weise.

Solches Neuronen-Chaos ist im richtigen Leben unerwünscht, es
tritt zum Beispiel bei Epileptikern und Parkinson-Patienten auf. Und
auch der Roboter Amos zappelt wild mit den metallenen Beinchen, wenn
seine Neurone chaotisch flackern. Doch der Schaltkreis der Göttinger
hat die schöne Eigenschaft, dass er sich mit einem winzigen
Korrektursignal dazu zwingen lässt, periodisch zu schwingen: Es
entstehen Muster, die sich alle vier, fünf oder acht Zeiteinheiten
wiederholen. Und die lassen sich direkt auf die Beine des Roboters
übertragen – und entsprechen jeweils einer Gangart des künstlichen
Insekts.
Die Programmierer müssen nur noch die Regeln festlegen, nach
denen die kleinen Korrektursignale gegeben werden. Diese Regeln
basieren auf dem Input von 18 elektronischen Fühlern. Zum Beispiel
spürt ein Neigungssensor, wenn es bergauf geht – schon wechselt Amos in
eine langsamere Gangart. Und wenn der Roboter in ein Loch tritt und er
dauerhaft den Kontakt zum Boden verliert, schaltet die Steuerung
einfach in den Chaos-Modus. Amos strampelt dann so lange wild herum, bis er
wieder sicheren Boden unter dem betreffenden Fuß hat.
Mehr: http://www.zeit.de/online/2009/37/ars-electronica-eroeffnunghttp://www.zeit.de/2006/29/T-Intelligenz
http://www.zeit.de/2009/16/T-Roboter-WG
Ein billig Roboter
ASURO

http://asurowiki.de/index.html
http://asuro.pytalhost.de/pmwiki/pmwiki.php/Main/InfrarotRS232Transceiver

http://www.asurowiki.de/pmwiki/pmwiki.php/Main/AsuroEvalBoard
Gefunden