In einem Foruschungsprojekt aus der Zahnmedizin ging es darum, einen
Antrieb für eine Zellen
Dehnungsmaschine mit elastischen Sinus-Zellendehnungen für eine
Wachstummskammer zu bauen.
Eine PC Steuersoftware unter LabView sendet dem Miko-Controller
Steuer-Anweisungen und visualisieret den Satus mit
Aktiv-Monitoring (siehe weiter unten..).. PDF der Forschungsergebnisse:cells-10-00298-v2.pdf
Siehe auch: Youtube Videos: leider etwas kurz geraten: http://www.youtube.com/watch?v=naDMfTPF6WI&feature=youtu.be
...und der Servo-Antrieb im mathematisch exakter Sinus-Dehungsamplitude
http://www.youtube.com/watch?v=wDE_EwiImvc&feature=youtu.be
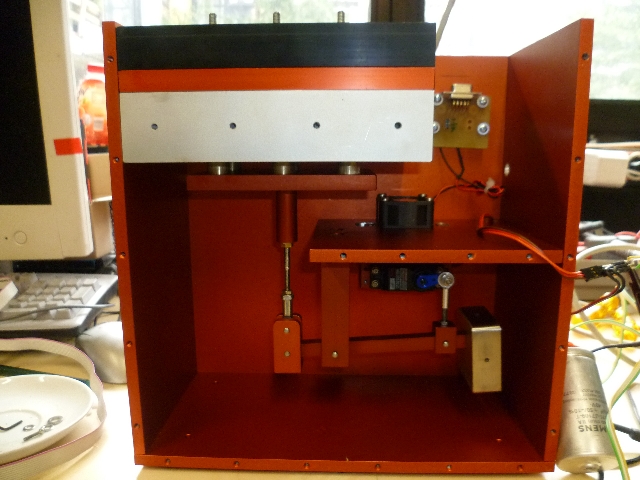
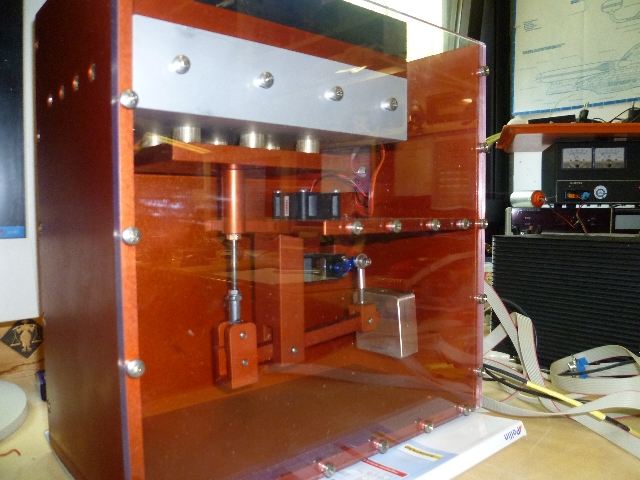
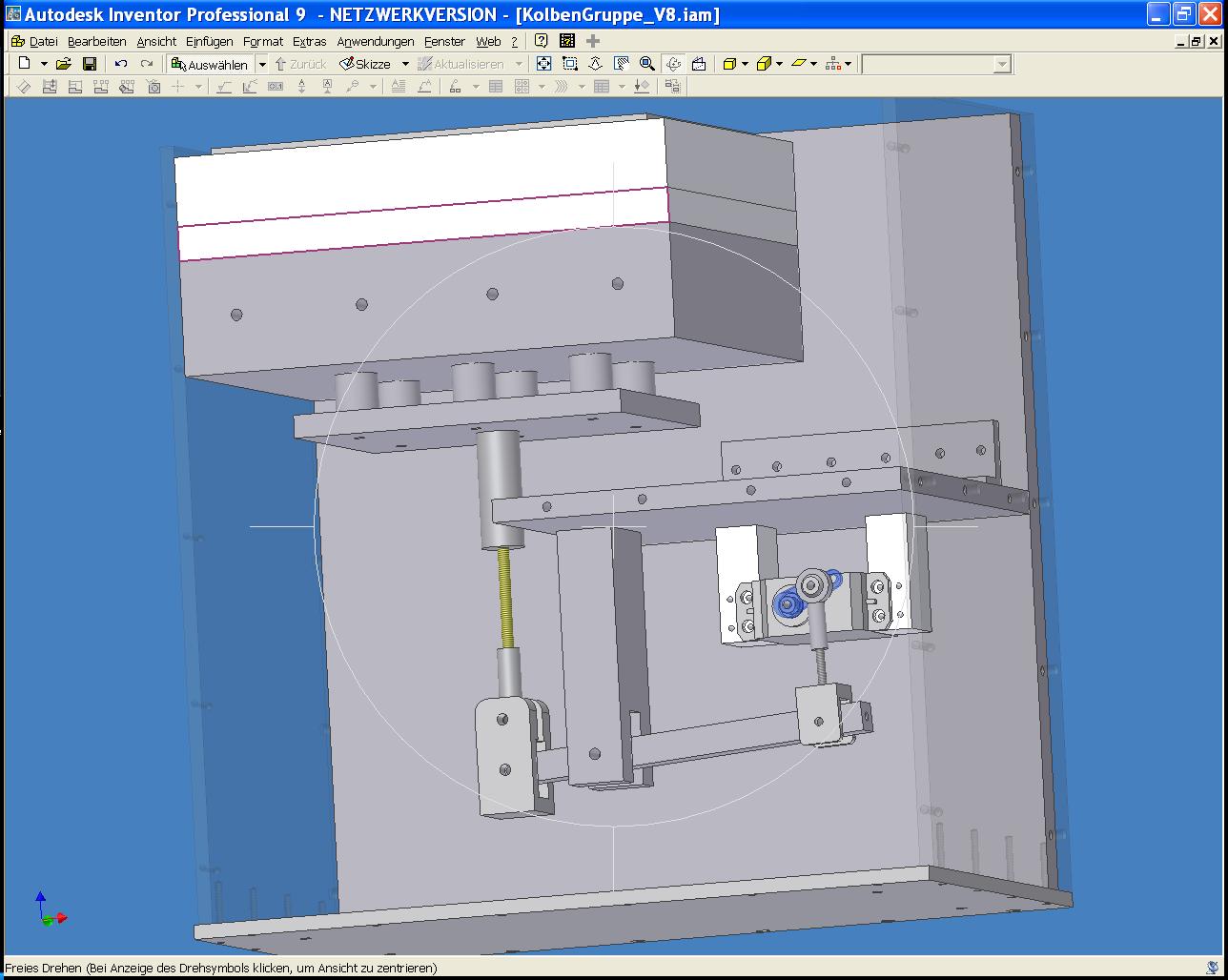
So sieht der mechanische Teil der Maschine
aus: Man erkennt
den
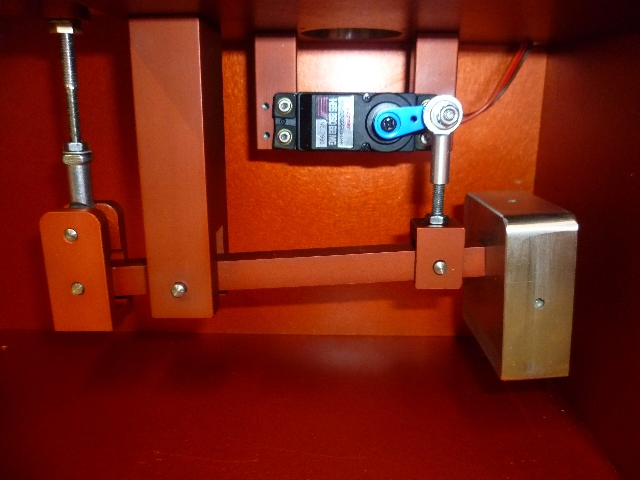
Servo als Antrieb am Hebel ( Kugelgelenke
verwenden )
Den mechanischen Antrieb realisierte ich mit
einem digitalen SERVO der
Firma Graupner und HiTec, mit Titangetriebe und BLDC Motor. (BLDC
= Brush Less DC Motor ).
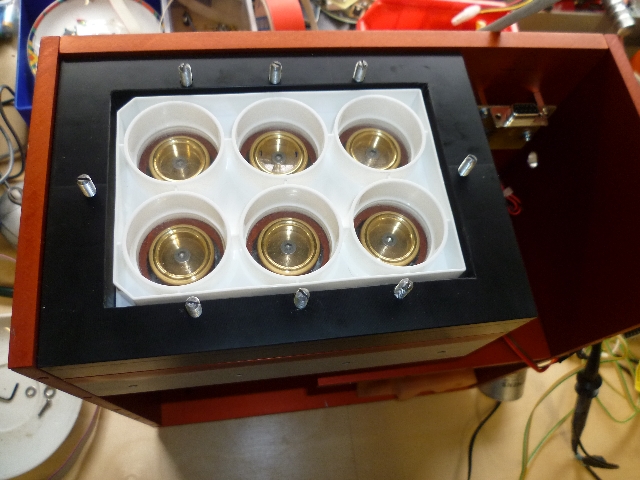
Die aktiven Probenträger mit flexiblem Latex-Boden werden
in den Kolbenrahmen eingespannt:
und der Antrieb:
Werdegang
der Entwicklung:
Die Maschine wurde komplett im 3D
Inventor entwickelt und Bewegungs-Simuliert
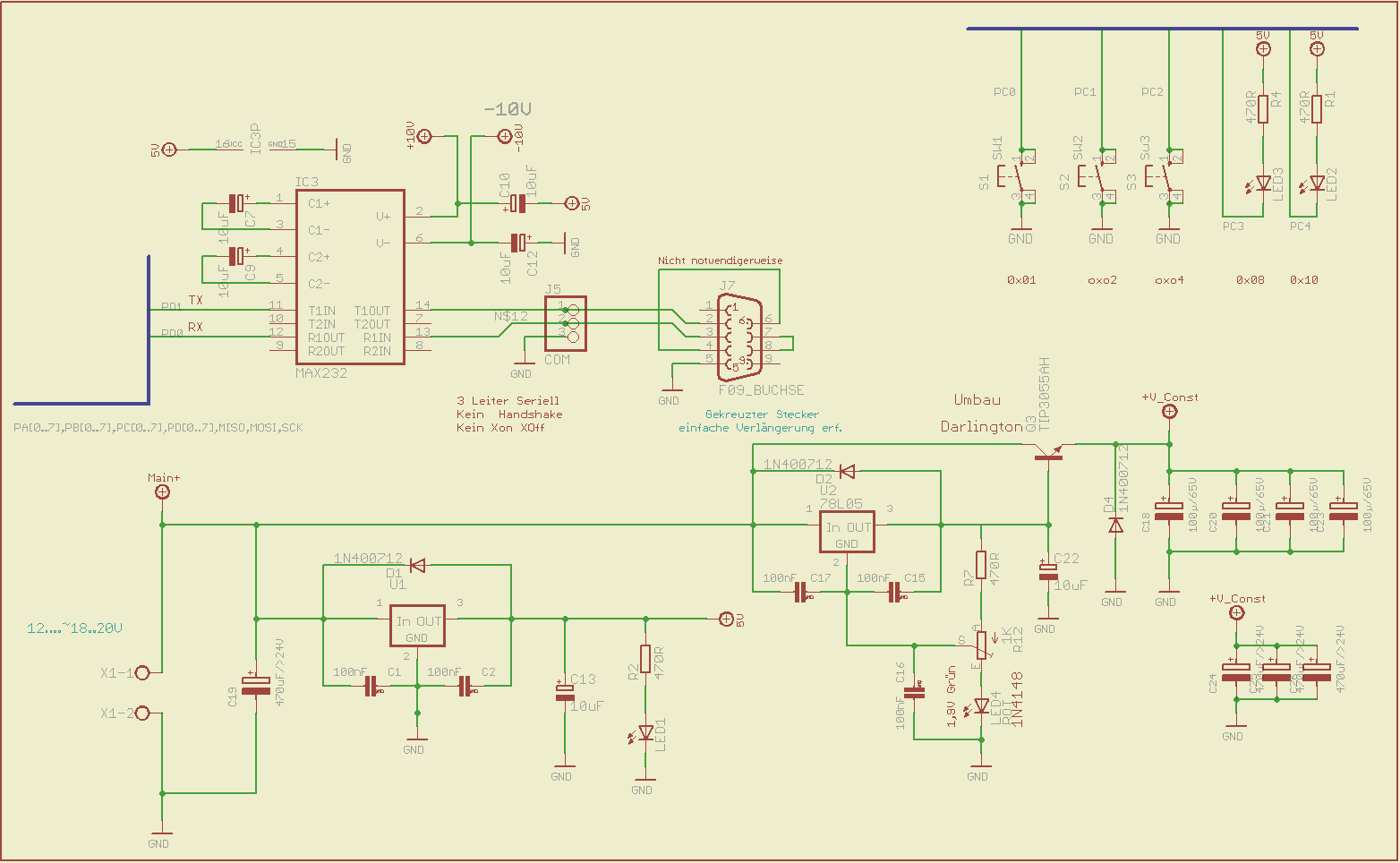
Als Antseuerung diente LabView als Softwareplattform : Schnelle
serielle Kommunikation mit 57600Baud..
Unkomplizierte textbasietrte Kommandos. Ping<13> -->
Pong<13>. Bsp: "Amp,30" = Setze Amplitude auf 30
Einheitenm, GFRQ= Get Frequency
Neueste Version war 07.05.2012
Zur Technik:
Der Servo wurde mit einer für digtale
Servos zulässigen PWM
Wiederholfrequenz von 244 Hz betrieben (4mSekunden PWM
Signalabstand)
( 50 Hz =
20mS sind für normale Servos Standard )
Berechung:: 16MHz Quarz / 256 Vorteiler , an 8 Bit Timer /256 = 244,14
Hz
Der Servo wird mit einem PWM von 0.9mS
bis 2,1 mS angesteuert.
Der Pwm wird Sinus
Moduliert, der zuerst in eine Tabelle berechnet wird mit:
gu16aKurve[u16NN] = round( u16OffSet + (fProzentAmpl/2.0 -0.5 ) +
(fProzentAmpl/2 - 0.5) * sin( 2* M_PI * u16NN/u16XAufloesung ) )
"die seltsame Brechnung wurde so gemacht damit die Rundung genau Werte
zwischen 0 und 255 ergeben"
Verständlicher: Y
= Aufloesung/2 + Aufloesung/2 * sin( 2* PI * Zaehler/Aufloesung )
// Zaehler geht von 0 bis (Aufloesung -1)
also vereinfacht: Y
= 128 + 128 *sin( 2*PI Ü nn/256)
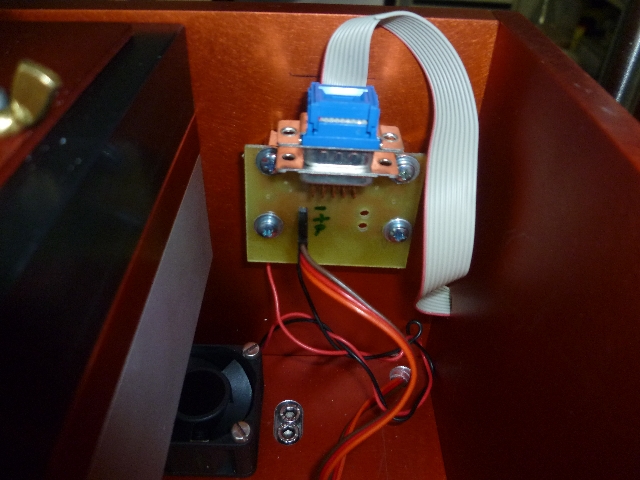
Die Mikrocontroller-Elektronik samt Powernetzteil für den Servo ist in
einem Steurgerät untergebracht
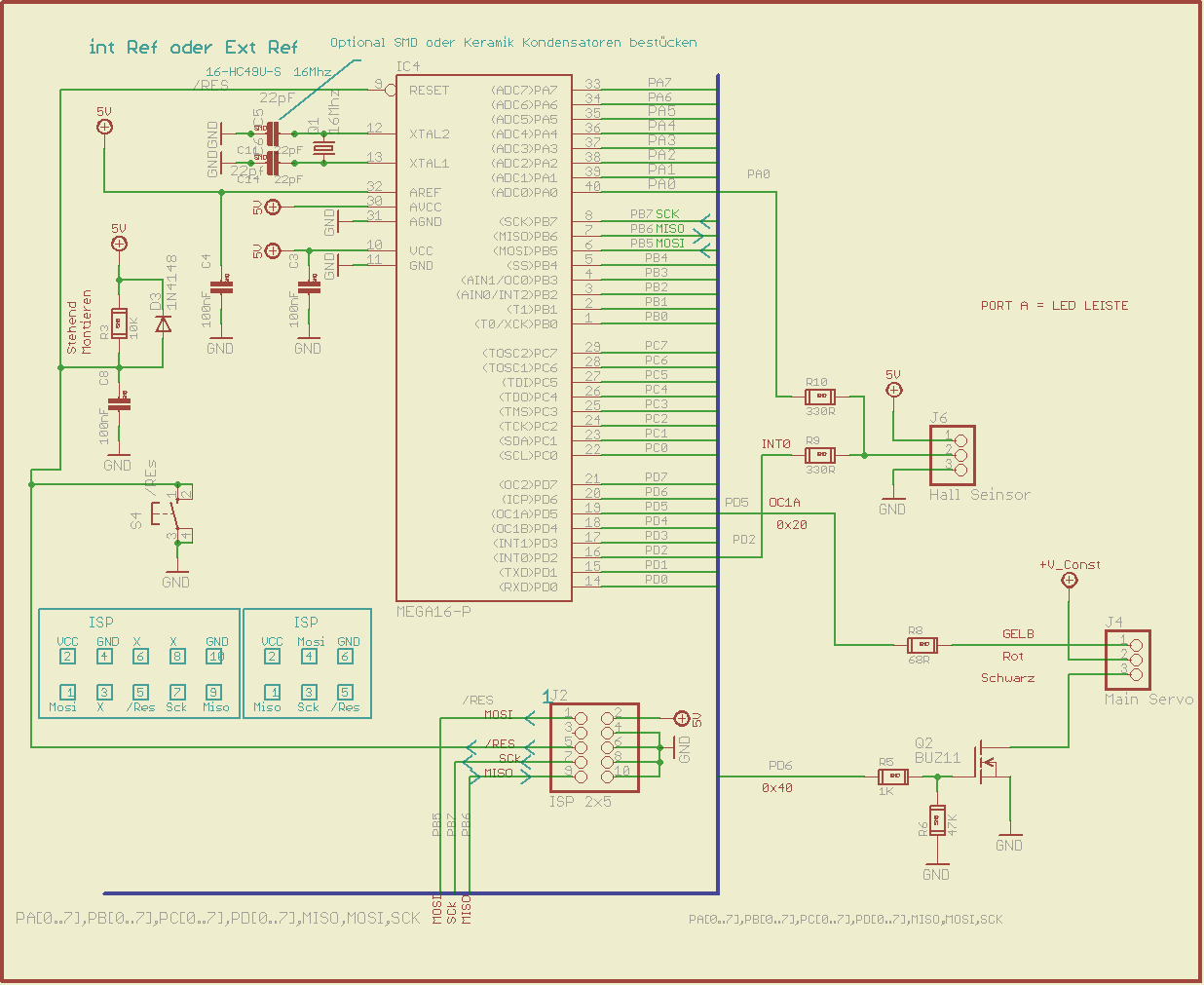
Natürlich wurde die Elektronik ebenfalls selbst gebaut: PWM
mit
10 Bit Auflösung an Timer1 = OC1A PWM
Ausgang
 (C)
Christof Ermer, Regensburg
(C)
Christof Ermer, Regensburg